IT/모바일 >
김용승 메이커의 대형 로봇 제작기!
[메이키 제작기 #04] 부위별 작업하기 2
※ 매주 수요일, 금요일 1회씩 연재됩니다.
※ 이 제작기의 내용은 김용승 메이커가 직접 작성한 것으로
저자와 협의되지 않은 무단전재, 수정 및 배포를 금합니다.
# 1회 - 11월 11일 금요일 [메이키 제작기 #01]
# 2회 - 11월 16일 수요일 [메이키 제작기 #02]
# 3회 - 11월 18일 금요일 [메이키 제작기 #03]
# 4회 - 11월 23일 수요일 [메이키 제작기 #04]
# 5회 - 11월 25일 금요일 [메이키 제작기 #05]
# 번외 - 11월 30일 수요일 [Interview 김용승 메이커에게 묻다!]
팔 상박 작업
머리도 어느 정도 만들어 졌으니, 이제 몸통에 연결할 팔을 작업할 차례다. 팔은 뼈대 없이 고밀도 MDF로 형태를 잡았다. 연필, 칼로 MDF 표면에 표시를 하고 직쏘로 잘라냈다. 팔의 상부에서 팔꿈치에 해당하는 부분은 작은 사각형 형태인데, 큰 상박과의 연결을 위해 상박의 밑판 가운데를 뚫어야 했다.
방법은 이렇다. 드릴로 각 귀퉁이에 구멍을 뚫고 직쏘를 넣어서 사각형을 뚫는다. 이때 단단히 고정하기 위해서 3cm x 3cm x 3.3m짜리 각목을 길이를 맞춰 자른 다음 안쪽에 덧대고, 여기에 작은 사각형 외피를 붙였다. 튀어 나오는 부분은 적당히 갈아내거나 잘라서 딱 맞춘다.

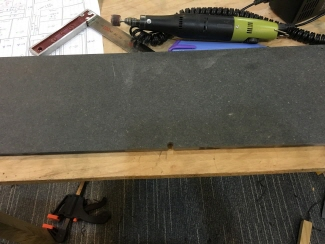
△ 팔의 외피 재단

△ 팔을 임시로 조립하면서 치수를 맞춘다. 가운데를 자를 때는 드릴로 구멍을 뚫은 뒤 직쏘를 넣어서 자른다.



△ 팔의 윗부분이 치수가 남아서 튀어 나와서, 사포로 안쪽을 갈아내어 딱 맞게 맞췄다.

△ 팔의 상부에서 하부로 연결되는 작은 사각형 모양의 결합
팔 고정 축의 결합
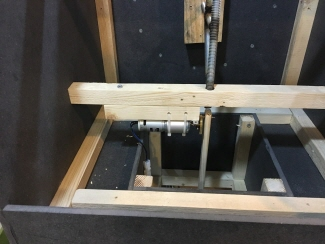
팔을 몸통에 결합하고 모터의 동력을 전달하기 위한 축을 팔에 고정한다. 고정축에는 키역활을 하는 부분을 용접하여 만든 부분이 있어서 팔의 몸통면과 축을 고정할 나무토막을 끼우기가 어렵다. 14mm로 구멍을 뚫은 나무 토막의 절반을 갈라서 키 부분을 지난 중간 지점에서 다시 조립하고 나사를 체결하였더니 단단히 결합되었다. 팔과 몸통의 틈간 거리, 외피의 두께 등을 고려해 나무토막 위치를 잡은 후 팔의 몸통 외피에 고정한다. 그다음 축이 헛돌지 않도록 T모양의 끝을 구멍을 뚫은 막대를 끼워넣은 후 팔에 고정한다.


△ 구멍을 미리 뚫고 절반으로 가른 나무토막을 축의 중심부에 고정


△ 축 고정이 완료된 팔들
여기에는 베어링이 필요한데, 베어링의 역할은 마찰을 줄여 회전이 원활하게 하기 위함이다. 이 베어링은 머리 하단부용 베어링과 같은 방법으로 제작했다. 목재를 일정한 높이로 토막내고 목재에서 베어링이 튀어 나오는 높이가 일정하도록 일정한 높이에 구멍을 뚫었다. 그다음 6mm 환봉을 다이아몬드 휠날로 가공하여 놓고 바이스로 끼웠다. 환봉을 바이스를 사용해 끼우는 이유는 정확히 수직의 힘을 가해야 환봉이 제대로 꽂히기 때문이다. 그러지 않고 망치로 때리거나 하면 축이 틀어지면서 들어갈 수 있다. 참고로 팔에는 머리보다 많은 12개의 베어링을 사용하는데 팔의 직경이 작아서 훨씬 조밀하게 배열이 되는 편이다. 각도계로 30도마다 표시를 하고 임시로 만든 지그로 축과 베어링 사이의 거리를 일정하게 띄워서 균일하게 배치되도록 한뒤 고정했다.


△ 팔에 배치된 베어링의 간격은 머리 부위 보다 훨씬 조밀하다.
팔 하박 작업
원래 팔의 하박과 손은 떨어져 있지만, 메이키는 일체형으로 만들 예정이었다. 그래서 나는 팔의 앞판, 뒷판을 똑같이 만들고자 두 판을 나사로 고정한 뒤 가공을 했다.


△ 나사로 고정한 뒤 가공하여 치수를 일치시킴


△ 임시 고정한 팔 하박
간단히 설명하면 이렇다. 팔 하박의 윗부분에는 팔 상박의 하단부와 결합하기 위해 구멍을 뚫은 막대를 안쪽에 붙였다. 팔의 상박 하단에는 구멍을 뚫었다. 팔의 상박 하단을 팔의 하박 윗부분 끼운 다음 14mm 나사를 상박 하단 구멍의 안에서 밖으로 끼워넣어 팔의 하박 구멍까지 들어가도록 한다. 이렇게 하여 팔의 바깥에서 봤을 때 별다른 티가 나지 않으면서 회전도 가능한 연결부를 만들었다. 회전이 가능하게 만든 이유는 손을 흔드는 연출을 하기 위해서였다.
모터의 결합 작업과 곡선 작업이 남았지만 팔이라는 큰 부품의 완성으로 메이키의 주요 부분은 다 만들어진 셈이었다.




△ 주요 부분이 다 만들어진 양팔
몸통 분리 작업
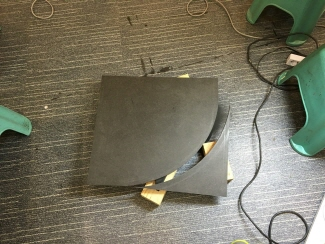
작업실 문의 너비가 90cm이기 때문에 몸통의 분리 작업은 필수였다. 나는 몸통을 분리하기 위해 미리 표시해 둔 부분을 톱으로 자르고 미리 용접해서 만들어 놨던 L자 브라켓을 몸통에 붙인 후 클램프로 찝어 놓았다. 톱을 사용해서 절단하면 길이가 1~2mm정도 소실되기 때문이었다. 그러면 몸통의 수직 기둥 4개의 길이가 달라져서 수평이 안맞게 되므로 4개 모두 똑같이 잘라서 수평을 맞춘 다음 나사못으로 고정했다.


△하나의 기둥만 절단하면 이렇게 틈이 생긴다. 기둥 4개를 절단한 다음 틈이 생기지 않을 때 고정하는 것이 좋다.


△ 몸통의 반쪽뿐이라도 혼자서 들기에는 벅차다. 사다리 2개와 긴 막대를 이용하여 몸통을 들어올려 결합했다.
발 외피 작업
팔을 만들었으므로 이제 남은 큰 작업은 외피를 만들어 붙이는 일이다. 열심히 그림을 그리고 자르고 그림을 그리고 잘라서 발을 만들었다.



△ 발꿈치 뒤로 전선이 나가는 구멍을 뚫었다.


△ 발이 완성된 모습


△발을 신겼지만 아직은 많이 휑하다.
몸통 라운드 부분 처리
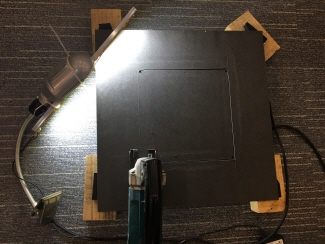
메이키의 몸통 곡선 부분을 만들기 위해 선택한 재료는 직경 30cm짜리 PVC파이프였다. 나는 이것을 수직 방향으로 1/4 사이즈로 잘랐다. 다만, 30cm짜리 PVC 파이프는 일반 철물점에서는 팔지 않았기 때문에 건축 자재를 판매하는 업체에 직접 주문을 해야만 했고, 배송에도 며칠이나 걸렸다. 필요한 부분은 1m 정도인데 기본 4m 단위로만 판매하고 있어서 곤란했으나, 마침 작업실이 2층이라 배송 문제 때문에 절반을 잘라서 2m로 만들어 주겠다고 했다. 작업실에 도착한 PVC 파이프는 정말 거대했고 또 무거웠다. 나는 정확히 1m만 필요했으므로 1m자를 이용하여 파이프에 수치를 표시했다. 둥근 형태라서 직쏘 톱날이 망가질 수도 있을 것 같아 톱으로 잘랐다. 다행히 PVC 파이프는 가공이 용이했다. 1m로 자른 PVC 파이프를 수직으로 잘라 1/4조각씩 나누는 작업은 직쏘를 사용했다.




△ PVC파이프의 가공
가공이 끝난 PVC 조각을 어깨에 얹어서 몸통 윗판과 옆판과 맞는지 확인했다. 정확히 만들었다고 생각했는데 실제로 맞춰보니 5mm 정도가 남았다. 결국 다시 남는 부분을 표시하고 디스크 샌더기로 갈아내서 맞췄다. 몸통 하단부 곡선은 어깨 부분과 다르게 몸통의 회전을 고려하여 둥글게 파내야 한다. 직쏘를 사용해서 파냈다.


△ 어깨에 임시 부착


△ 재가공한 어깨부분을 몸통에 정식 부착


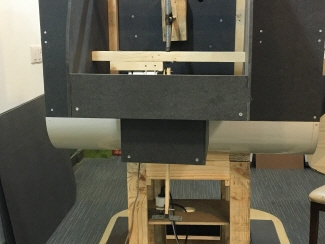
△ 몸통 하단부 곡선은 회전을 고려 원형으로 파냄, 하단부 곡선부분을 몸통에 부착한 모습


△ 몸통에 부착하고 뒷쪽에서 금을 그은 뒤 자른다. 사진은 몸통 외피가 완료된 모습이다. 드디어 제대로 된 형태가 나오기 시작했다.
팔 모터 연결 작업
손을 흔드는 연출을 하기 위해서 필요한 모터를 팔의 상박에 넣는 작업을 했다. 손을 흔드는 데 많은 힘이 들지 않을 것이므로 토크가 30 kgf/cm 정도인 비교적 작은 DC geared 모터를 사용했다. 손을 흔드는 메커니즘은 크랭크 방식을 취했는데 상박에 고정한 모터에 연결한 톱니바퀴에서 로드(긴막대기)를 움직여 팔의 하박을 움직이게 했다. 먼저 톱니바퀴에 6mm환봉을 박아 외팔보(cantilever)를 만들고 로드에 베어링을 넣어서 외팔보에 끼웠다. 로드 하단에 베어링을 끼우고 환봉을 L자 브라겟을 양쪽에 끼워 넣고 E링으로 고정하니 완성됐다.


△ 톱니바퀴에 외팔보를 만들어 크랭크로 사용한다. 브라켓 가공 모습

△ 완성된 팔흔들기 모터 메커니즘, 상박에 고정한 모터

△ 팔 하박과 연결 모습


△ 모터에 전원을 넣어서 팔을 흔드는 연출을 해 봄
다리 외피의 제작
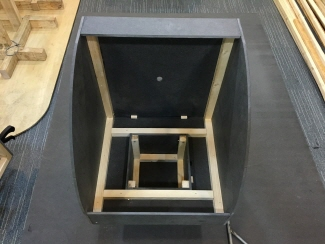
다리 외피도 만들어야 할 부품수가 많았다. 판에 도안을 그리고 자르고 그리고 자르고의 연속이었다. 외피의 제단이 끝난 뒤 외피를 다리 뼈대에 붙였다. 다리 상박 뒷 부분은 열릴 수 있게 제작했다. 전원의 연결과 메이키를 조작하는 외부 컨트롤러를 사용할 때 열어서 사용하고 사용이 끝나면 닫아 놓을 생각이었다. 다리 윗단 브리지 부분도 감싸듯 외피를 붙였다.


△ 다리 뒷부분은 열릴 수 있게 제작했다.


△ 다리의 외피 완성


△ 브릿지부분을 외피의 완성, 완성에 근접한 메이키의 모습이 나온다.
테두리의 부착과 미진한 부분의 완성
메이키의 로고를 보면 메이키의 몸체는 빨간색이고 바탕은 흰색이다. 몸체들이 연결 되는 부위도 바탕과 연결된 흰색이다. 이건 사실 연결 부위가 떠 있음을 의미 한다. 그런데 나는 연결 부위를 흰색이 나는 일종의 부품으로 해석했다. 심미적인 관점에서 흰색 띠가 들어가는 것이 더 멋있고 베어링등 흉한 부분을 가려줄 수 있기 때문이다.
머리와 몸통을 연결하는 부위는 비닐 코팅된 MDF 3T 판을 길게 잘라서 만들었다. 눈의 LED보드는 전원선을 납땜하여 붙이고 축옆에 뚫어놓은 구멍으로 전선을 빼내었다. 눈 LED가 위치할 지점 각도를 계산하여 자리를 잡고 고정을 하였다. 팔 상박 윗부분과 손의 둥근 부분은 포맥스 1T판을 사용해서 덮었다. 팔과 몸통부 사이의 테두리도 비닐 코팅된 MDF 3T판을 사용해서 만들었다. 이로써 모든 부분을 완성했다.
다음 작업은 색칠이다.


△ 머리와 몸통사이에 위치하는 머리 테두리를 둘렀다.


△ 전원선을 붙이고 눈 LED의 정확한 위치를 잡아 고정한 모습


△ 팔과 몸통 사이의 연결부 원형 테두리 작업
도색 작업
메이키의 칠은 컴프레셔를 이용한 압축공기로 페인트를 스프레이하는 방식으로 작업을 진행했다.
나는 먼저 페인트를 스프레이하여 공기 중에 떠다니는 작은 페인트 방울이 작업실에 묻지 않도록 벽을 신문지와 비닐을 이용하여 메이키를 중심으로 감싸듯 덮었다. 빨간색을 칠하기에 앞서 페인트 칠이 잘 되도록 목재용 프라이머리를 먼저 칠하기로 했다. 프라이머리가 흰색이어서 메이키의 흰색띠를 부분을 집중적으로 칠했다. 프라이머리가 마른 뒤 흰색이 필요한 부분을 마스킹 테이프로 붙였다.
그런 다음 빨간색 페인트를 칠했다. 메이키 미니미를 만들 때와는 또 다른 느낌이었다. 메이키 미니미는 락카스프레이를 이용해서 칠했는데 크기가 작아서 나름 골고루 페인트가 뿌려졌다. 그런데 메이키는 크다 보니까 스프레이가 많이 묻는 부분과 적게 묻는 부분이 있어 얼룩덜룩해 보였다. 마르기를 기다렸다가 덧칠하는 것을 3번 정도 하니까 얼룩덜룩한 것은 사라지고 어느 정도 색이 균일해졌다.
아쉬웠던 점 한 가지는 프라이머리를 꼼꼼하게 칠했으면 하는 점이었다. 시간에 쫓겨서 흰색이 드러나는 부분만 집중적으로 칠했더니 나중에 빨간색을 많이 칠해도 프라이머리를 안 칠한 부분에는 거뭇거뭇한 감이 있었다.
페인트가 마르고 난 뒤 머리에 눈을 붙이기 위해 마스킹 테이프를 떼어 내었다. 눈은 순간접착제를 사용해서 조심히 붙였는데 접착제를 조금만 사용하였다. 많이 사용해서 접착제가 흐르게 되면 다 된 밥에 재를 뿌리는 격이 될 것이다.


△ 신문지를 벽에 붙이는 모습, 메이키 제작에 나와 정민정 작가 외 숨은 조력자가 있었다.


△ 프라이머리 칠 작업중, 눈도 프라이머리로 칠한다.


△ 머리와 팔


△ 앞판에 M자를 그려 넣는다.


△ 흰색을 남길 부분에 마스킹 테이프 작업을 한다.


△ 처음 칠했을 때는 얼룩덜룩해 보였다.


△ 3회 정도 덧칠하니 조금씩 균일해지기 시작했다.


△ 페인트가 마르고 난뒤 눈을 붙이기 위해 마스킹 테입을 제거한 상태, 신기한 모양일세!

△ 눈 부착
로봇 컨트롤 룸

정민정 작가에게로봇 컨트롤 룸의 제작을 의뢰했다. 전체적인 컨셉은 메이키를 조정하는 소년, 소녀를 표현한 것이고 작은 메이키를 두어 메이키 안에 메이키가 또있는 재밌는 상황을 연출하였다.
배경은 해저2만리에나 나올 법한 아날로그 감성이 느껴지는 스팀펑크 스타일로 만들었다. 사실 가운데 둥근 커다란 창과 소년의 앞에는 LCD모니터를 달았는데 미처 영상 작업을 하지 못하여 전시중에 보여 주지 못하였고 작업실에서와는 다르게 야외로 나와서 새벽 이슬도 맞고 다음날 비도 맞고 하니 나무로 만든 오토마타가 습기를 먹어서 그런지 뻑뻑하고 잘 작동되지 않았다. 내년에는 좀 더 멋진 로봇 컨트롤 룸이 되어 관람객 앞에서 다시 섰으면 한다.
《4회 끝 / 다음 회에서 계속됩니다.》
※ 글: 김용승 메이커
※ 편집: 홍혜은 에디터
이전 글 : 전자회로로 그린 발광 타투
다음 글 : 점토 조각하기
관련 콘텐츠
![[메이키 제작기 #03] 부위별 작업하기](/data/cms/CMS4490010507_thumb.jpg)
![[메이키 제작기 #02] 본격적인 작업 시작!](/data/cms/CMS8447043015_thumb.jpg)
![[메이키 제작기 #01] 제작 의뢰부터 기획까지](/data/cms/CMS8150258172_thumb.jpg)
![[메이키 제작기 #프롤로그] 김용승 메이커의 대형 로봇 제작 도전기!](/data/cms/CMS1113394015_thumb.jpg)
최신 콘텐츠